Overfitting & double descend
Why does SGD work so well?
3 reasons identified so far (paper):
- Hyp 1 (“classic” hyp.): because it computes noisy gradients, which regularizes training
- “the ratio of the stepsize 𝜂 to the batch-size 𝑏, which essentially controls the magnitude of the stochastic gradient noise”
Why does SGD work so well?
- The “noise” introduced by SGD is structured:
- vanishes near global optima
- stays in same low-dim manifold as gradients
- See Francis Bach’s blog
- analyzes a continuous form of SGD aka “gradient flows”
- in overparameterized regime and with simple networks, proves that this structured noise makes SGD converge towards either L1 or L2 minima
- Label noise also helps!
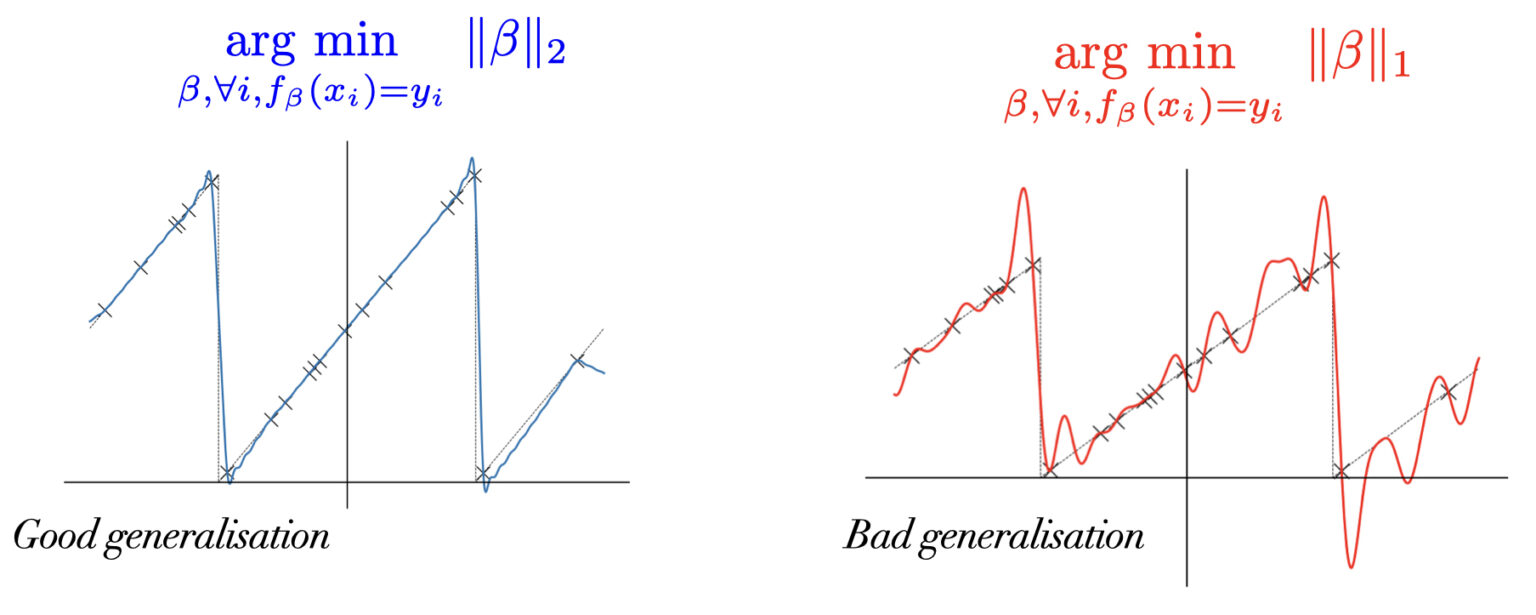
Better L1 or L2?
- \(f=\) linear regression with feature map: \(f(x)=<\beta,\phi(x)>\) \[\phi(x) = (\frac 1 k \cos(2\pi kx), \frac 1 k \sin(2\pi kx))_{k\leq d/2}\]
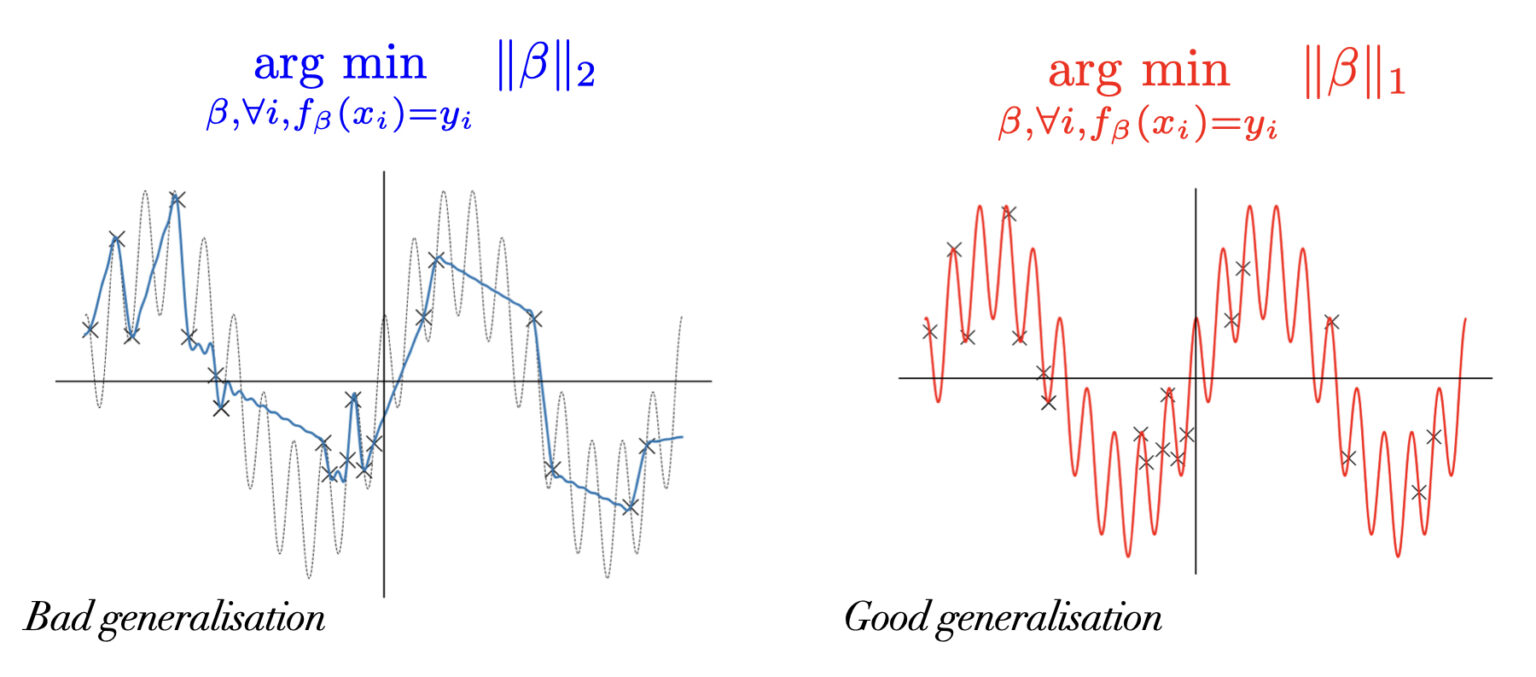
Better L1 or L2?
SGD vs. GD

Why does SGD work so well?
- Hyp 2: “flatness” of the local minimum found by SGD, which is related to the eigenvalues of the Hessian
- Zhou paper studies SGD as a stoch. diff. equation
- Show that the noise in SGD enables to more easily escape basin of attractions than Adam
- see Bengio’s paper
- high values of the ratio of learning rate to batch size leads to wider minima
- cf. chapter 6 of this course
Why does SGD work so well?
- Hyp 3: “heavy-tail” of the network weights at convergence
Bias-variance tradeoff
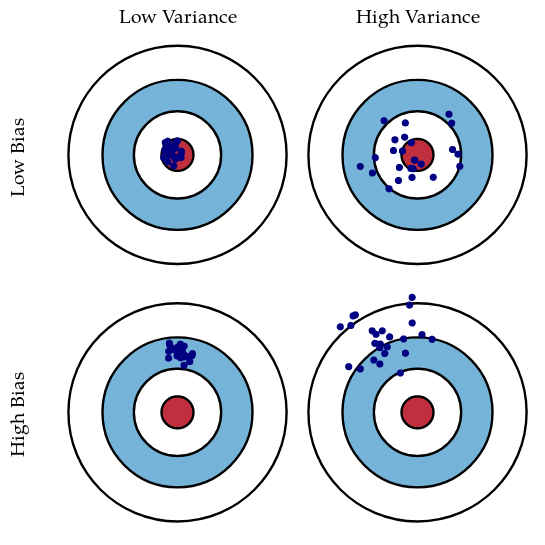
Depends on both classifier + learning method
Let \(Z\) be a random variable with distrib \(P\)
Let \(\bar{Z} = E_P[Z]\) be the average value of \(Z\)
Lemma: \[E\left[ (Z-\bar{Z})^2 \right] = E[Z^2] - \bar{Z}^2\]
- Let \(f\) be a real function, and our task be \(p(y|x)\) s.t. \(y=f(x)+\epsilon\)
- with \(\epsilon \sim N(0;\sigma^2)\)
We fit an hypothesis \(h(x) = w\cdot x +b\) with MSE over a training corpus
- Let be a new data point \(y = f(x) + \epsilon\):
- What is the expected error ? \[E\left[ (y-h(x))^2 \right]\]
Expected over the training corpora of \(h\): \(x\) is constant
\(E[(h(x)-y)^2] = E[h^2(x)] -2E[h(x)]E[y] + E[y^2]\)
Apply the previous lemma to both square terms:
\(E[(h(x)-\bar{h(x)})^2] + \bar{h(x)}^2 -2\bar{h(x)}f(x) + E[(y-f(x))^2] + f(x)^2\)
Factorize:
\(E[(h(x)-\bar{h(x)})^2] + (\bar{h(x)} - f(x))^2 + E[(y-f(x))^2]\)
- (Wrong) intuition: it’s more important to reduce bias
- Yes, on the average in the long run, low-bias models may perform well
- But long run avgs are irrelevant in practice !
- Bagging helps to reduce variance:
- resample corpus \(\rightarrow\) train multiple models
- average predictions
- Ex: Random forests
- Large bias: underfitting
- Increase nb of parameters
- Large variance: overfitting
- More regularization
Under/over-fitting
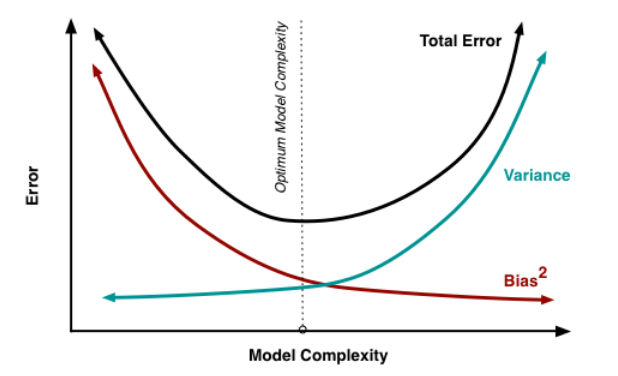
- Model “capacity” depends on nb of parameters + topology
How to find this optimum ?
- There are theoretical measures (see Aikake’s Information Criteria)
- But much better to use a development corpus
Overfitting in practice
- Fixed model capacity
- Never stop at “Nice, it’s compiling and running, I’m done!”:
- Try to overfit on 1 batch, 10, 100…
- Play with regularization
- Find the broad “overfitting threshold”
- What if I double the capacity?
- …
- Art: interpreting the train and dev loss curves
Experiment, analyze, experiment, analyze…
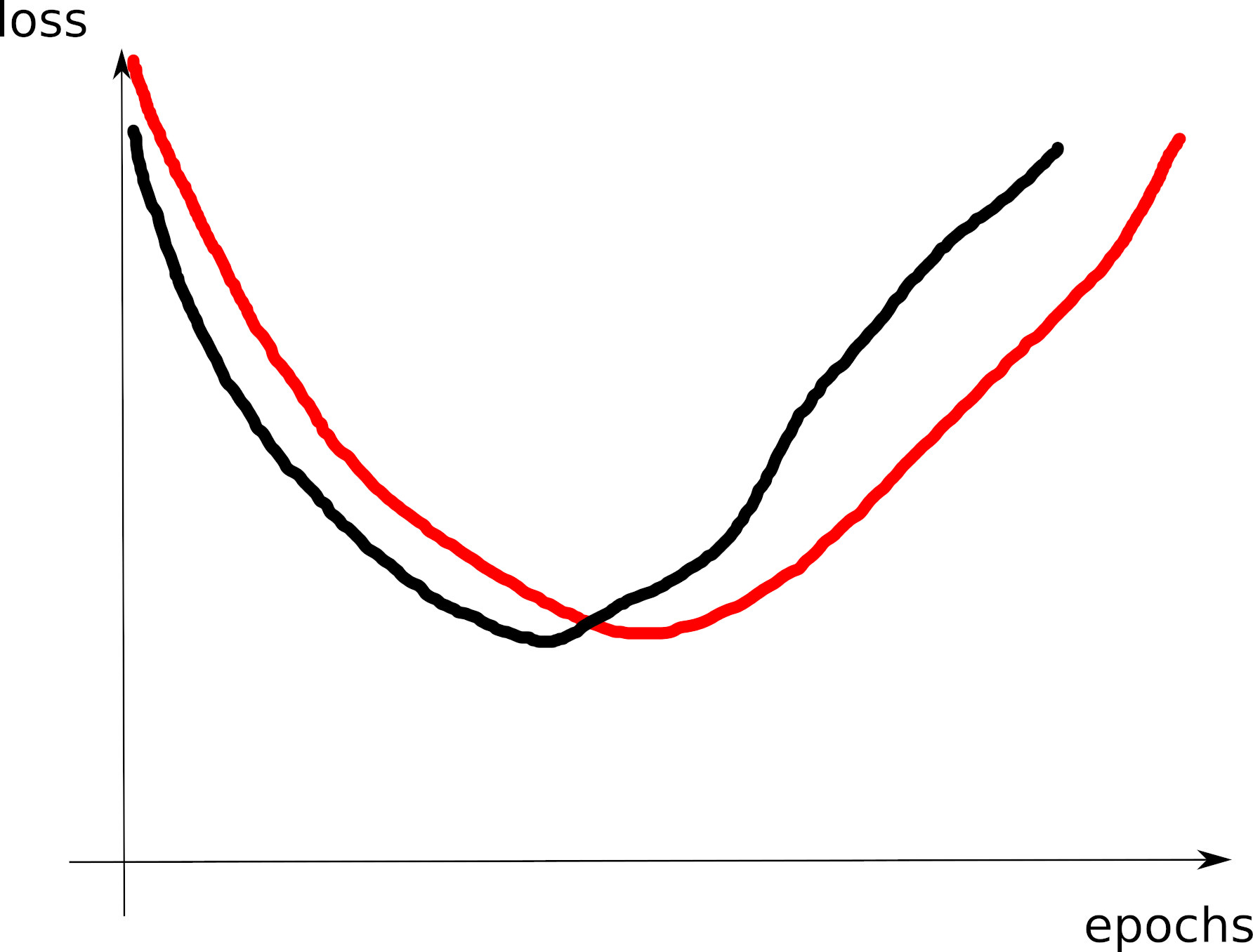
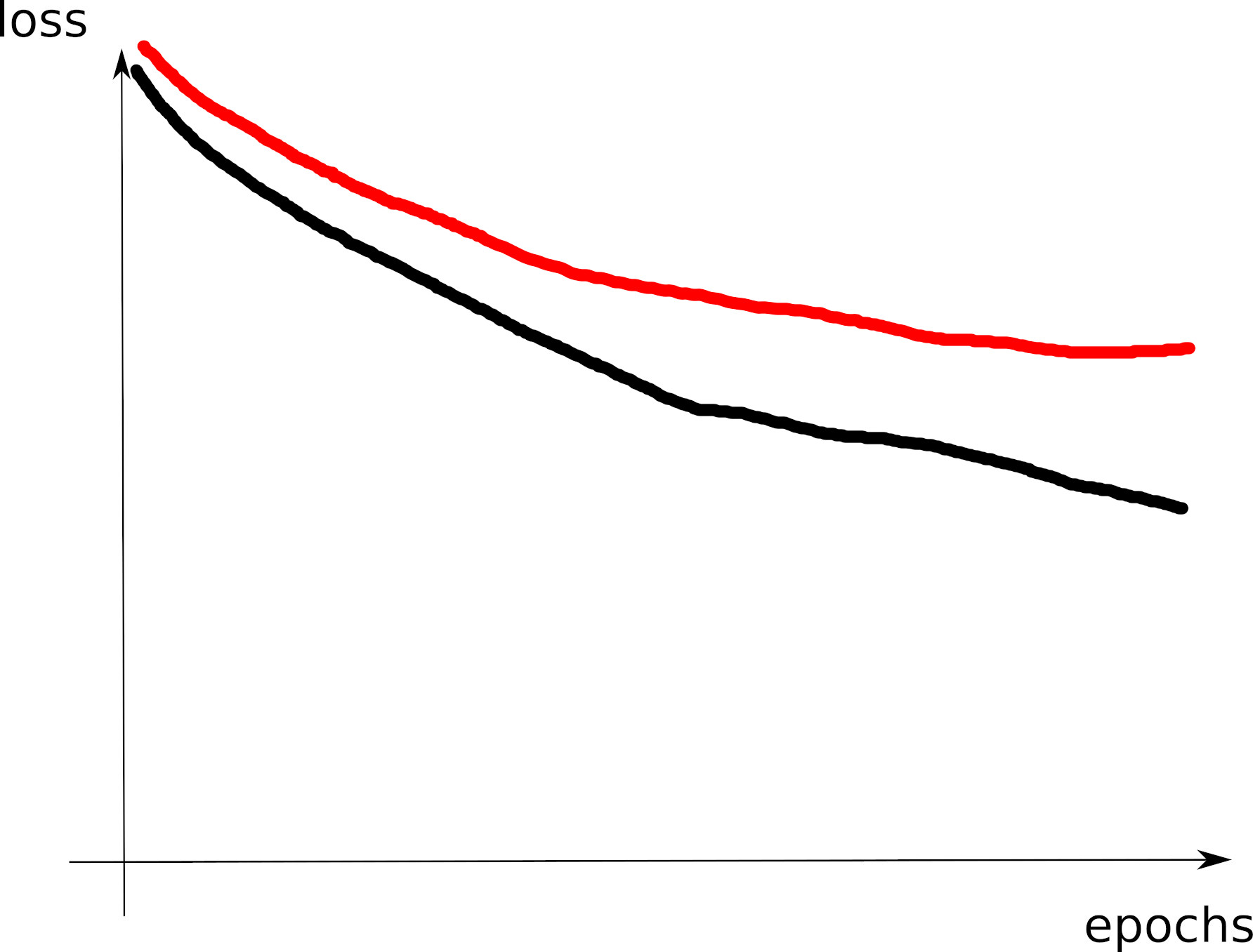
Train/dev loss curves
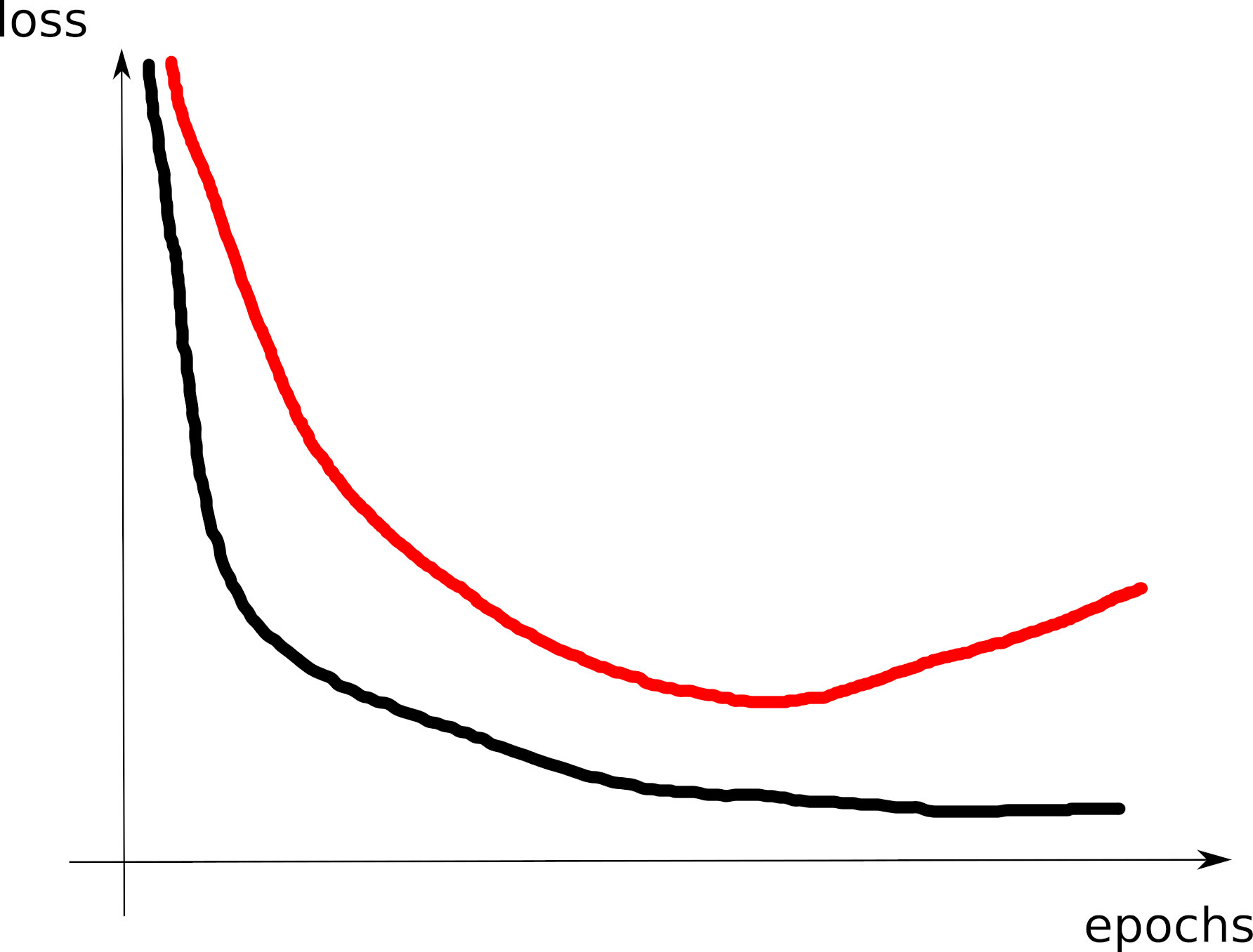
- C1: good curve: model around the overfitting threshold
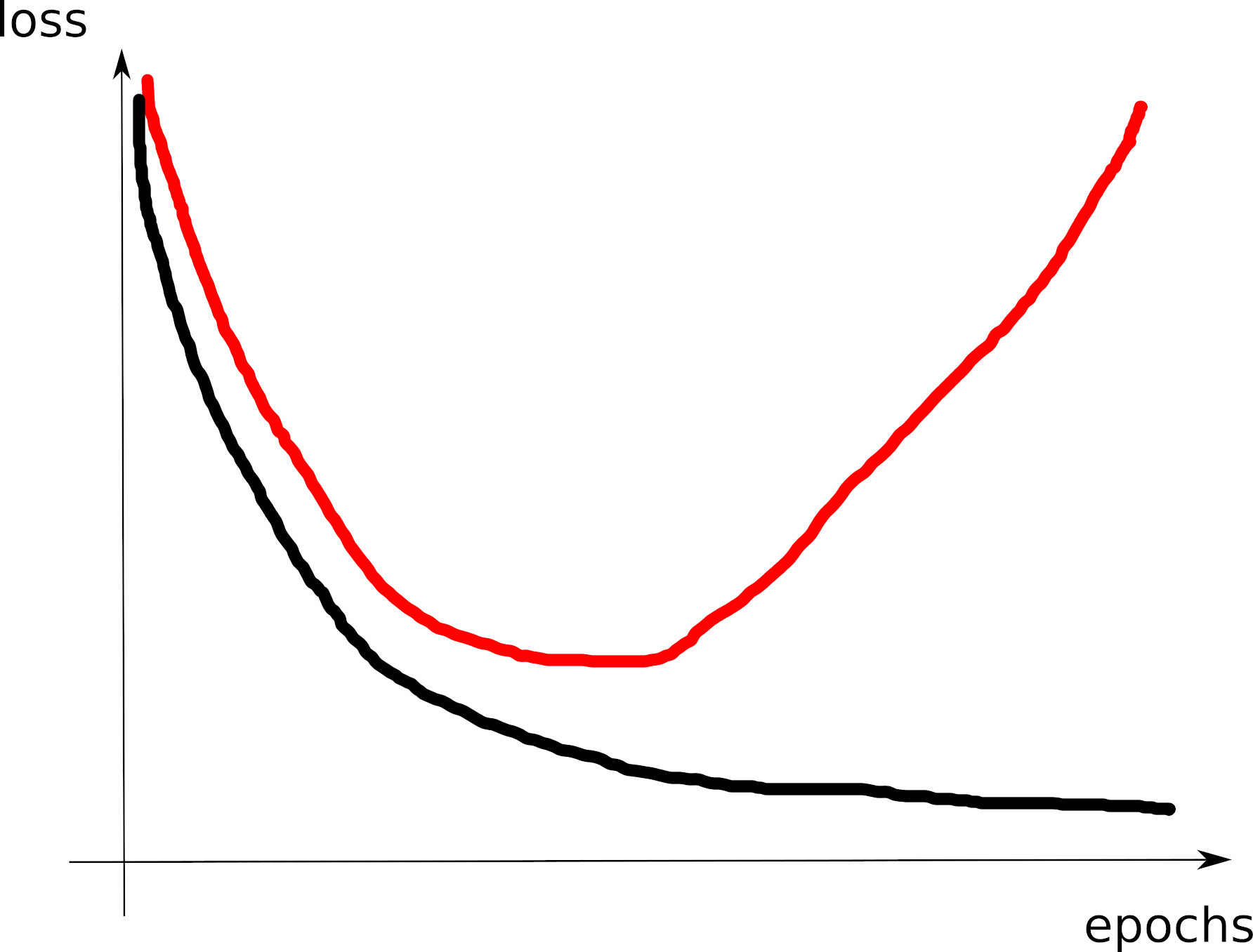
- C2: model (too far?) on the right of the overfitting threshold
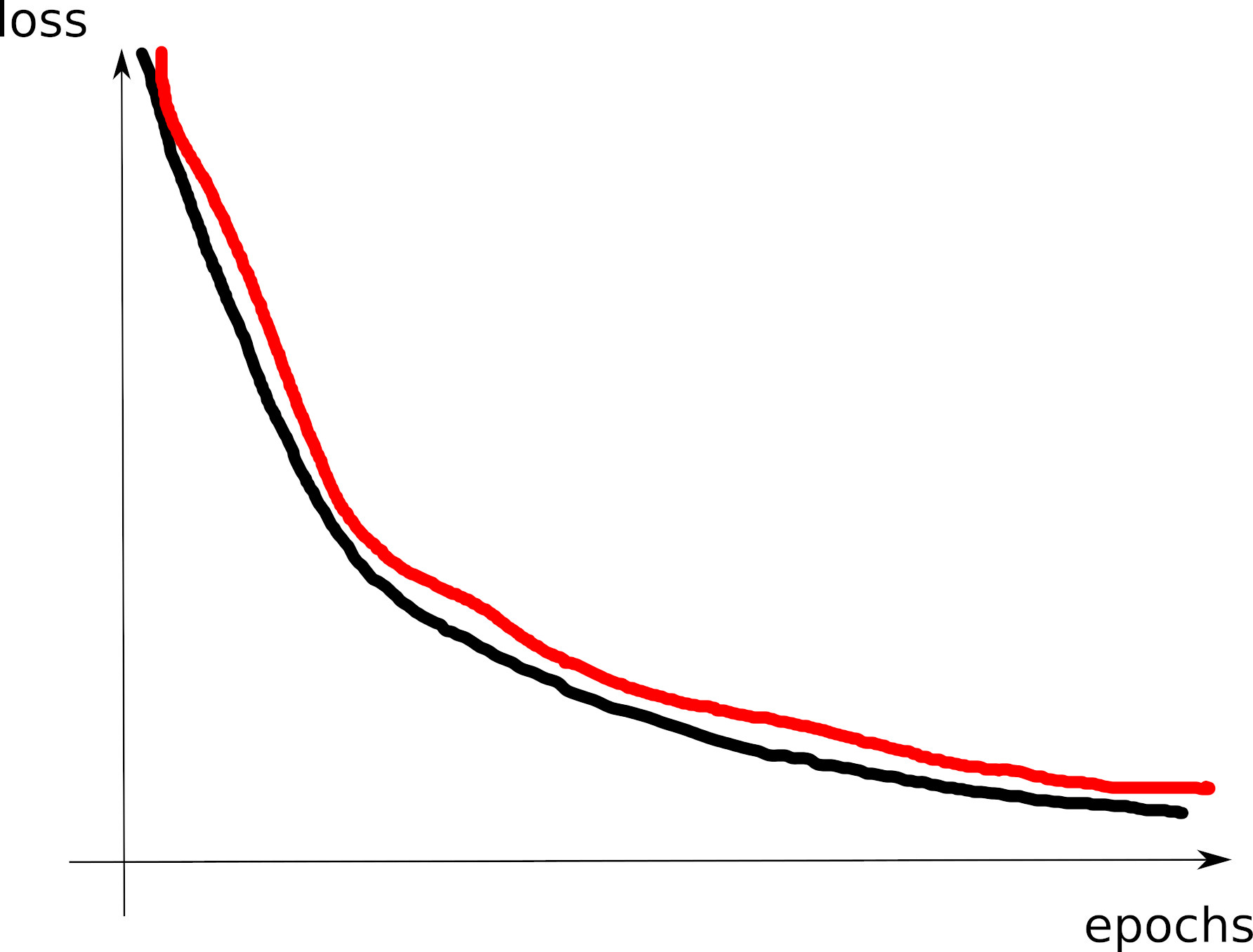
- C3: model (too far!) on the left of the overfitting threshold
- C4: convergence issue: check LR

- C5: training loss=0: model capacity large (too large?)
- C6: large training loss: model capacity too small
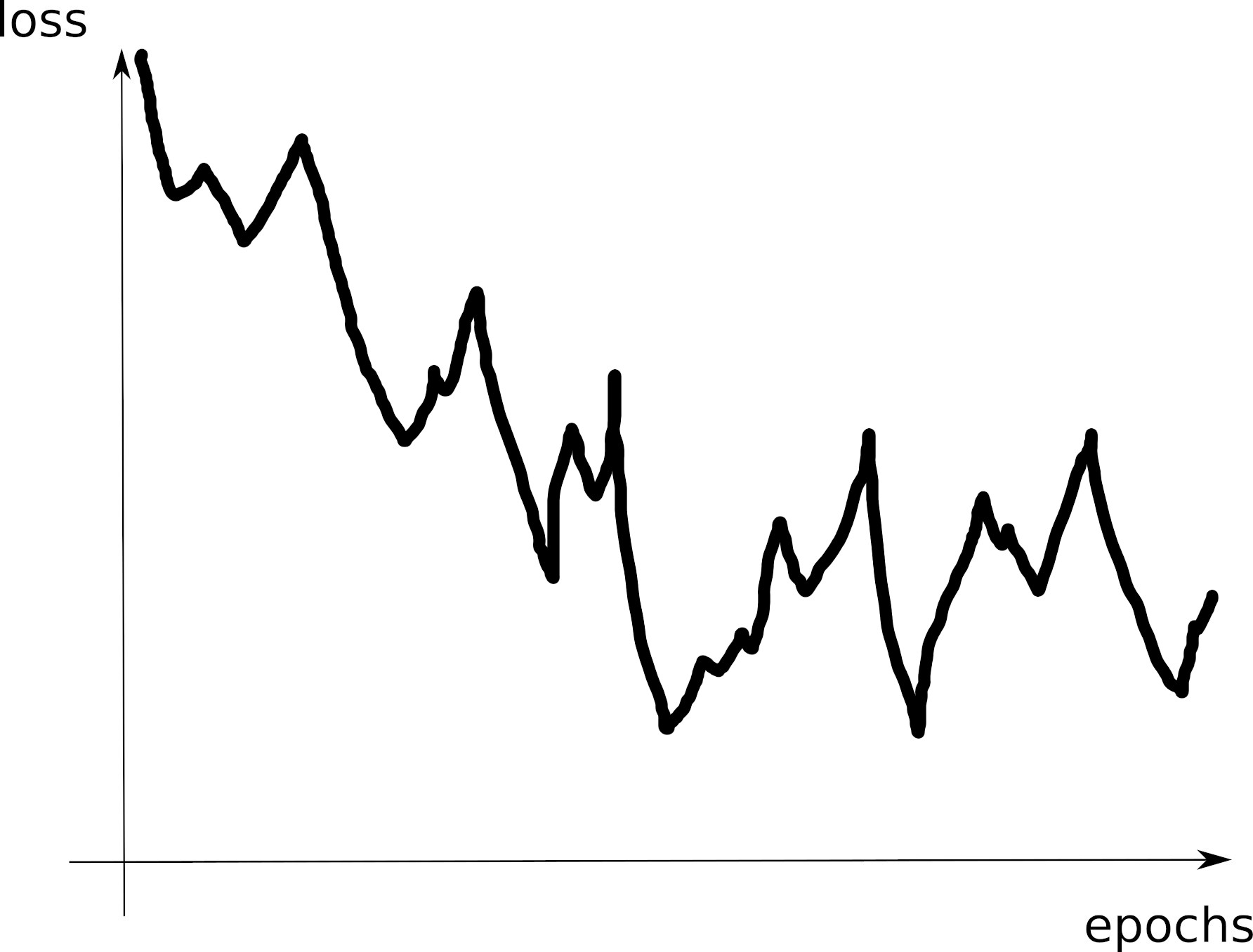
- C7: unstable training loss: reduce LR?
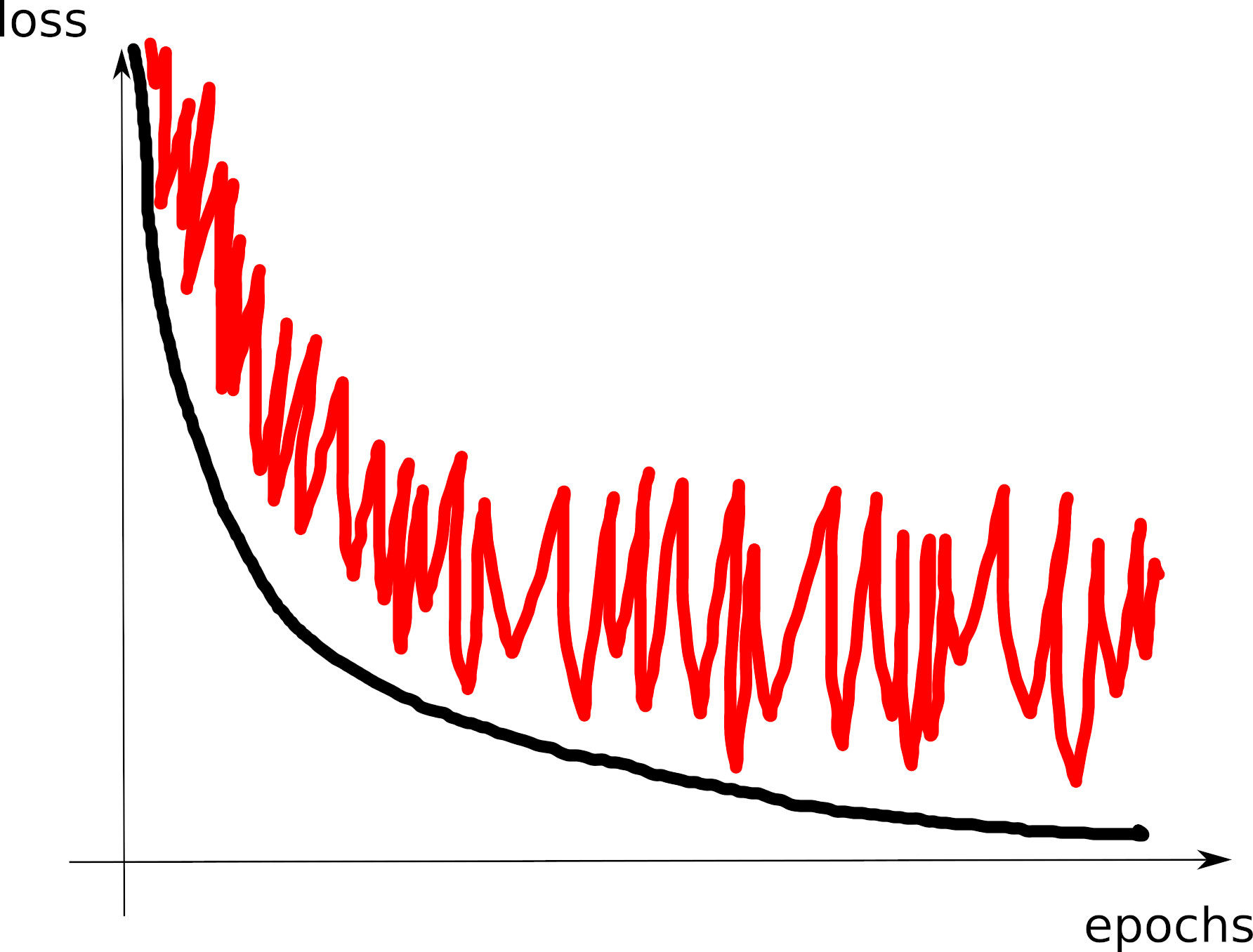
- C8: unstable dev loss: did you average it over the corpus?
Computing the loss
- Can be averaged over the whole corpus:
- dev corpus usually small ==> OK
- train corpus huge! LLMs are often trained over a single epoch
- Can be averaged over a batch
- “just report every loss computed”
- the smaller the batch, the larger the variability
- running average since the beginning of the corpus?
- Can be averaged over \(n\) batches
- much smoother curves, easier to interpret
- but which value of \(n\)?
Train vs. Dev absolute loss values
- Are the train and dev loss values comparable?
- Sometimes, yes, often no:
- “train” vs. “eval” mode: dropout…
- should be representative of the distribution = averaged over enough data
Dev loss or accuracy curve?
- cross-entropy is strongly related to accuracy, but is different
- The loss can decrease either because:
- the nb of errors decrease
- the model becomes “over-confident” in its predictions
Overfitting is not bad-1
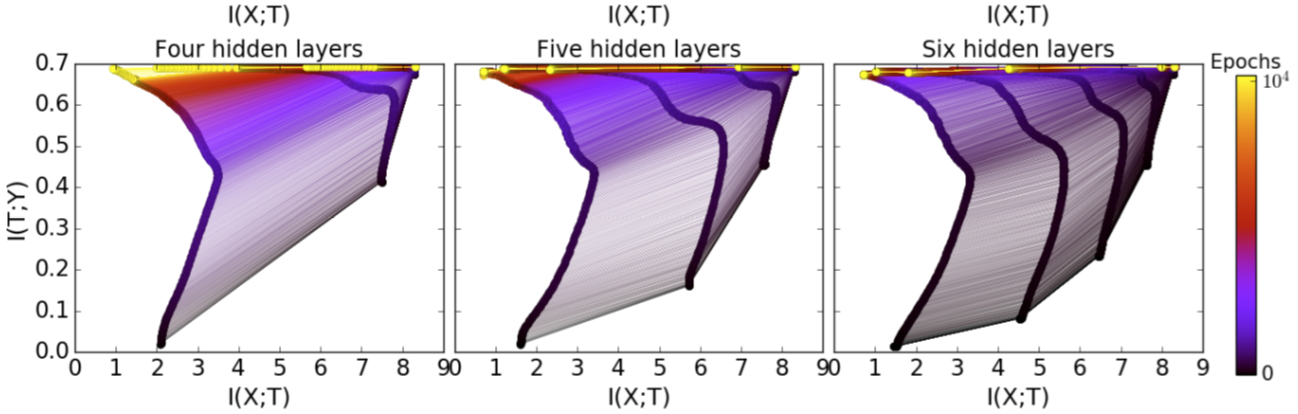
- Tishby’s “information bottleneck”
Tishby’s bottleneck
(Tishby, 2015)
https://arxiv.org/abs/1503.02406
- 2 phases: overtraining, then compression
Overfitting is not bad-2
- “double descent” (Belkin at al., arxiv 1812.11118, 2018)

Let us consider the following regression problem:
- gold (unknown) function \(f(x)=4(x-\frac 5 2)^2\)
- observations: 6 samples
- (0,25) (1,9) (2,1) (3,1) (4,9) (5,25)
Inspired by https://mlu-explain.github.io/double-descent2/
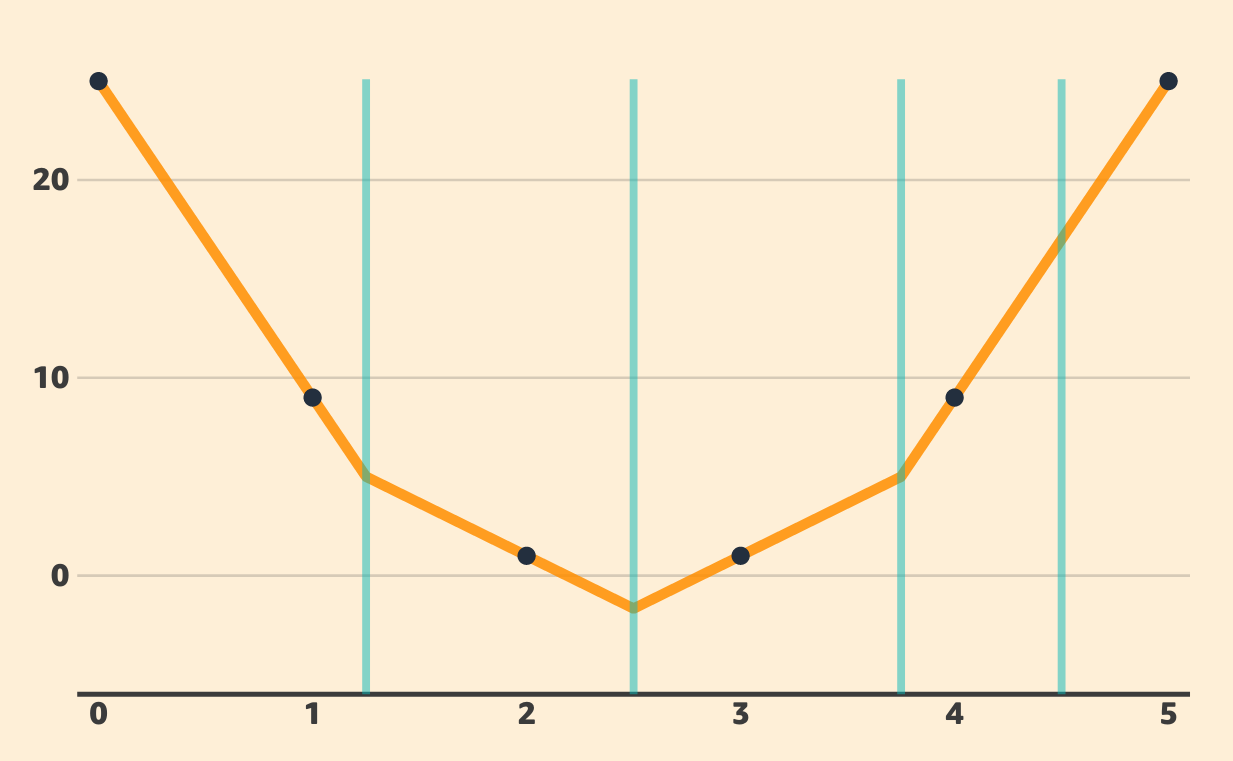
- model = piecewise linear fonction with fixed “knot points” \(t_k\):
\(g(x) = \alpha + \beta x + \sum_{k=1}^K \gamma_k \phi_k(x)\)
with
\(\phi_k(x) = \frac 1 2 |x-t_k|\)
- parameters = \((\alpha,\beta,\gamma_k)\)
- you can show \(g(x)\) is a parametrization of piecewise linear functions
- the slope between two knots is constant = weighted sum of \(\gamma_k\)
- you can make it equal to any piecewise linear = \(K\) linear eqs with \(K\) unknowns
- case \(K=0\): linear regression
- Implementation in pytorch: model:
class Knots(nn.Module):
def __init__(self):
super(Knots, self).__init__()
self.alpha = nn.Parameter(torch.Tensor([0.]))
self.beta = nn.Parameter(torch.Tensor([0.]))
def forward(self, X):
return self.alpha + self.beta * X- data:
traind = torch.utils.data.TensorDataset(
torch.Tensor([0,1,2,3,4,5])/10.,
torch.Tensor([25,9,1,1,9,25])/100.)
train_loader = torch.utils.data.DataLoader(traind, batch_size=6, shuffle=True)- training loop:
def learn():
nepochs = 50000
lossf = nn.MSELoss()
mod = Knots()
opt = torch.optim.Adam(mod.parameters(), lr=0.01)
for ep in range(nepochs):
n,totloss = 0,0.
for x,y in train_loader:
n+=1
opt.zero_grad()
haty = mod(x)
loss = lossf(haty,y)
totloss += loss.item()
loss.backward()
opt.step()
totloss /= float(n)
print("TRAINLOSS",totloss,mod.alpha.item(),mod.beta.item())- Exercice: plot the loss curve with \(K=0\)
- You should obtain:
- horizontal line
- loss plateaus at 0.11
- underparametrized regime
- model underfits
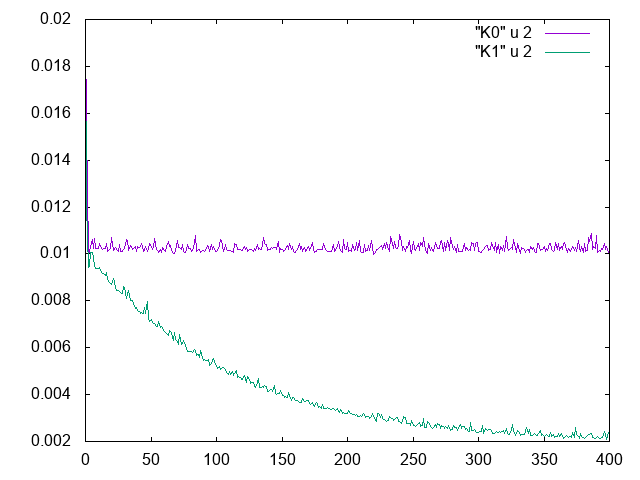
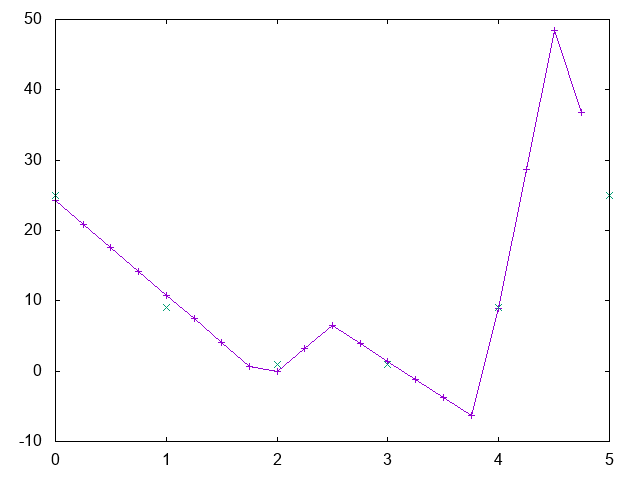
- With \(K=1\), you get (see exercice):
![]()
- At the interpolation threshold: solution determined by the knots:
- single choice per knot positions
- Let’s compute the expected error, when sampling the first knot uniformely between 1 and 2
- Let’s assume the first knot is at t0: \(P(t_0 \in [2-\epsilon; 2-\epsilon/2]) \propto \epsilon\)
- assume \(\epsilon<0.9\), then the knot is at best \((2-\epsilon,0.9)\) and the slope \(\geq 0.1/\epsilon\)
- so the error (q-norm) is at least in the order of \((1/\epsilon)^q\)
- Let’s consider the population of samples \((\epsilon = 1/2^m)_m\), each with probability \(\propto \epsilon\)
- The expected error is greater than the sum of the errors:
\[E[||\hat f - f||_q] \geq \sum_m^{\infty} \frac 1 {2^m} (2^m)^q = \sum_m^{\infty} 2^{m(q-1)}\]
- The error is infinite !
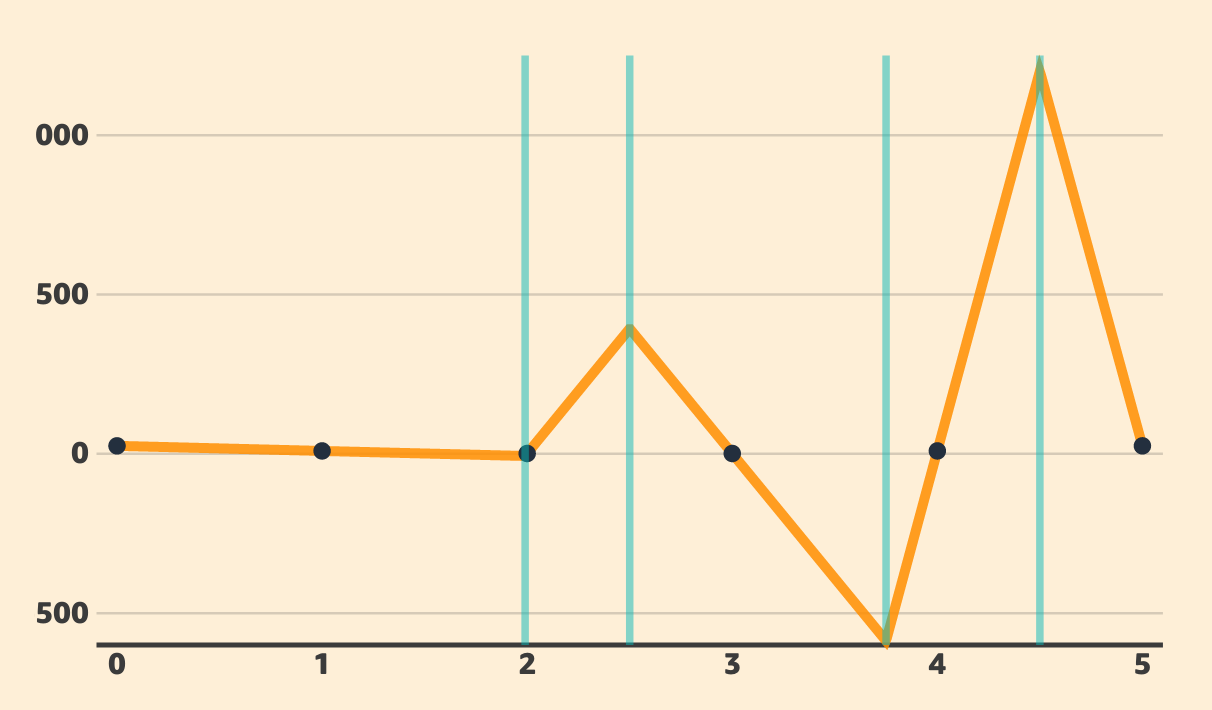
- loss curve at \(K=4\):
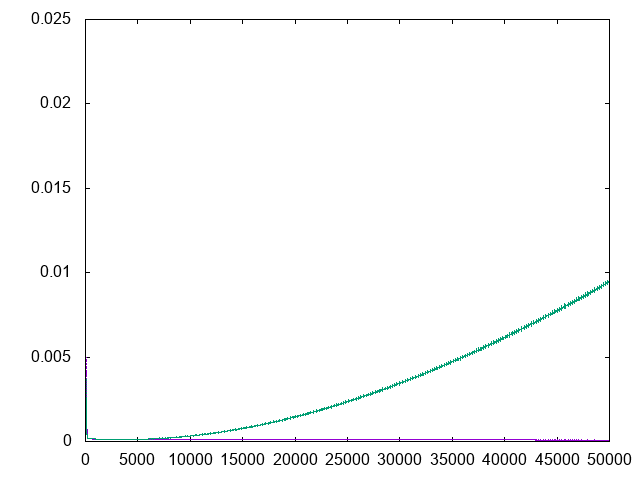
- Over-parametrized model:
- more than one possible solution
- Let \(\delta_i\) be the slope of segment \(i\)
- \(\delta_{i+1}-\delta_i = \gamma_i\)
- as when crossing \(t_i\), a single weight changes its sign in the sum of slopes \(g(x) = \alpha + \beta x + \sum_{k=1}^K \gamma_k \phi_k(x)\)
- Let \(\Delta_i\) be the distance btw the center of both segments
- Let’s assume we have many knots, so \(\frac {\delta_{i+1}-\delta_i}{\Delta_i} = \frac {\gamma_i} {\Delta_i}\) approximates the second derivative \(g''(t_i)\)
- Let \(p(x)\) be the uniform proba to sample \(t_i\)
- The proba that \(t_i\) lies in \(\Delta_i\) is approx. \(\Delta_i p(t_i)\)
- Alternative view: we know one of the \(K\) knots is there, so the proba it’s \(t_i\) is \(1/K\) \[\Delta_i \simeq \frac 1 {Kp(t_i)}\]
- So let us regularize our MSE loss by minimizing \(||\gamma||^2\):
\[||\gamma||^2 = \sum_k^K \gamma_k^2 \simeq \sum_k^K g''(t_k)^2 \Delta_k^2 \simeq \frac 1 K \sum_k^K \frac {g''(t_k)^2}{p(t_k)} \Delta_k\]
- This is an approx. of the integral of \(\frac {g''(t_k)^2}{p(t_k)}\)
\[||\gamma||^2 \simeq \frac 1 K \int \frac {g''(x)^2}{p(x)}dx\]
- assume \(p(x)\) is uniform on the domain, and \(g''(x)=0\) outside the domain, then we minimize \(\int_a^b g''(x)^2 dx\)
- so we look for an interpolation that is as close to linear as possible
- == natural cubic spline
- Extension to Multi-Layer Perceptron: proof by Singh & al., ICLR’22
- assumptions:
- MLP \(f()\) trained on data \(S\sim D\) to minimum \(\theta^*\)
- Empirical loss \(L_S\)
- covariance of loss gradients: \(C_L^{D} (\theta) = E_{z\sim D} [\nabla_{\theta} l(z,\theta) \nabla_{\theta} l(z,\theta)^T]\)
- covariance of function Jacobians: \(C_f^{S} (\theta) = \frac 1 {|S|} Z_S(\theta) Z_S(\theta)^T\)
- with \(Z_S(\theta)=[\nabla_{\theta} f_{\theta}(x_1), \dots, \nabla_{\theta} f_{\theta}(x_{|S|})]^T\)
- \(H_L^S(\theta^*)\) = Hessian of \(L\) estimated on the training corpus \(S\)
- \(r\) = rank of Hessian;
- \(\lambda_1,\dots,\lambda_r\) = eigenvalues of Hessian in decreasing order
- \(\lambda_{min}(A)\) = smallest eigenvalue of matrix \(A\);
- \(\sigma^2_{(x,y)} = ||\nabla_f l(f_{\theta^*}(x),y)||^2\)
- \(\exists\) a sample \((x,y) \sim D\) s.t. \(\sigma^2_{(x,y)>0}\)
- \(\alpha\) is the probability of \((x,y)\) in D;
- \(\tilde D = \{(x,y) \sim D : \sigma^2_{(x,y)}>0\}\);
- \(\sigma^2_{min} = \min_{(x,y)\sim \tilde D} \sigma^2_{(x,y)}\)
\(L(\theta^*) \geq \tilde {L_S}(\theta^*) + \frac 1 {n+1} \frac {\sigma_{min}^2 \alpha \lambda_{min} \left( C_f^{\tilde D} (\theta^*) \right)} {\lambda_r \left( H_L^S(\theta^*) \right) }\)
- with the “one-sample training loss” \(\tilde {L_S}(\theta^*) = E_{z\sim D}[l(z,\theta^*_{S\cup \{z\}})]\)
- What is important = \(\frac 1 {\lambda_r\left( H_L^S(\theta^*) \right)}\)
- Assume MSE Loss (and a few other hypothesis…):
\(L(\theta^*) \geq \tilde {L_S}(\theta^*) + \frac {\sigma_{min}^2 \alpha A \lambda_{min} \left( C_f^{\tilde D} (\theta^0) \right)} {B ||C_f^{D} (\theta^0)||_2 \left( \sqrt n - c \sqrt p \right)^2 }\)
- \(A\), \(B\) and \(c\) are constant
- \(\theta^0\) is initial model
- \(n\)=samples \(p\)=parameters
- Infinite for \(p=\frac 1 {\sqrt c}n\)
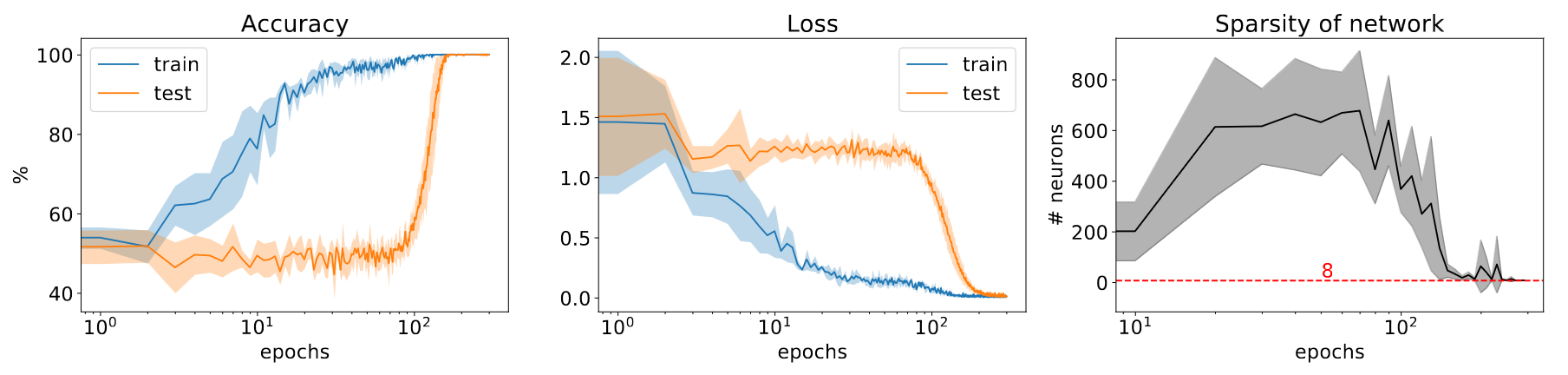
Grokking
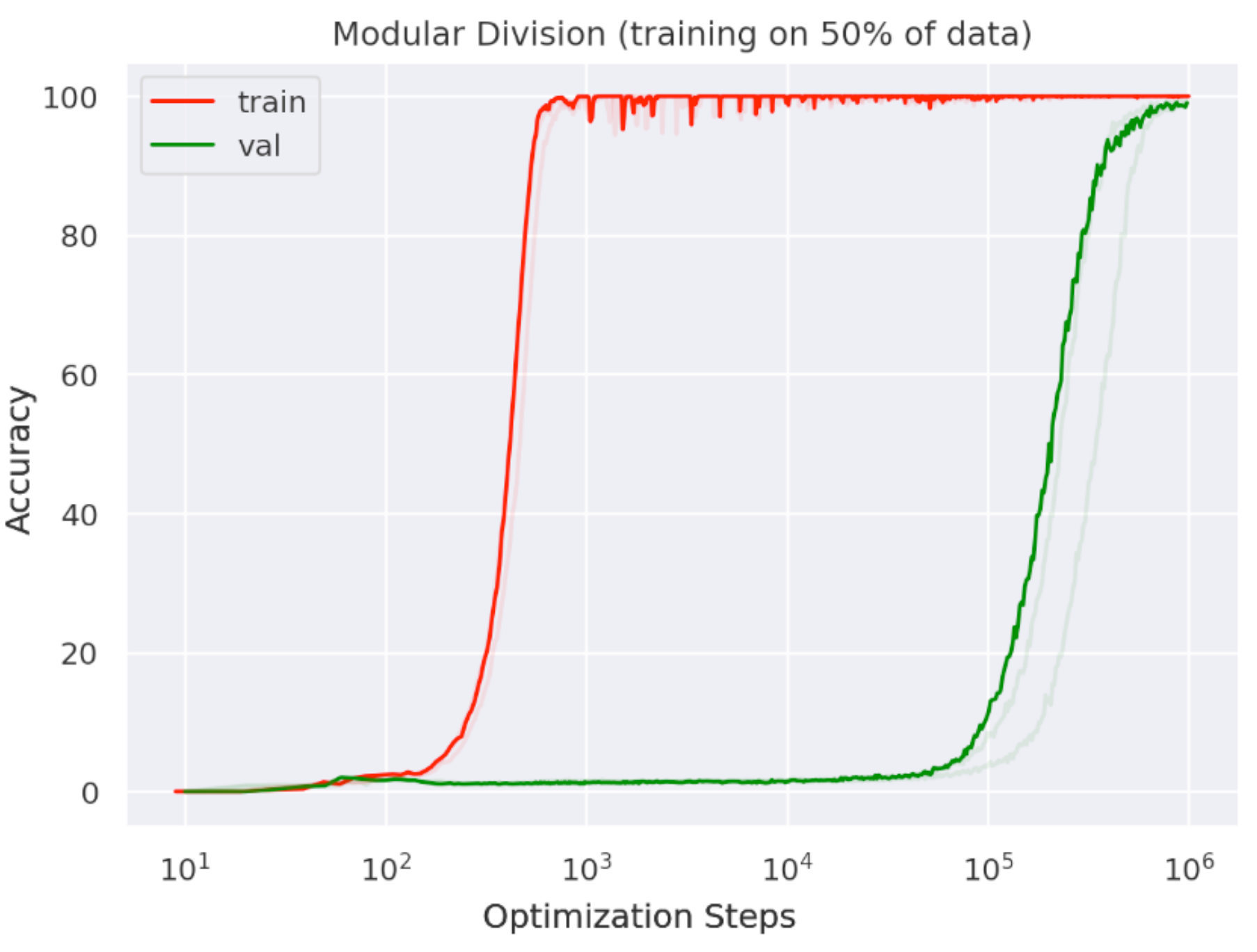
- First observed by Google in Jan 2022
- Trained on arithmetic tasks
- Must wait well past the point of overfitting to generalize
- It often occurs “at the onset of Slingshots” Apple paper
- Slingshots = type of weak regularization = when “numerical underflow errors in calculating training losses create anomalous gradients which adaptive gradient optimizers like Adam propagate” blog
- post-grokking solutions = flatter minima
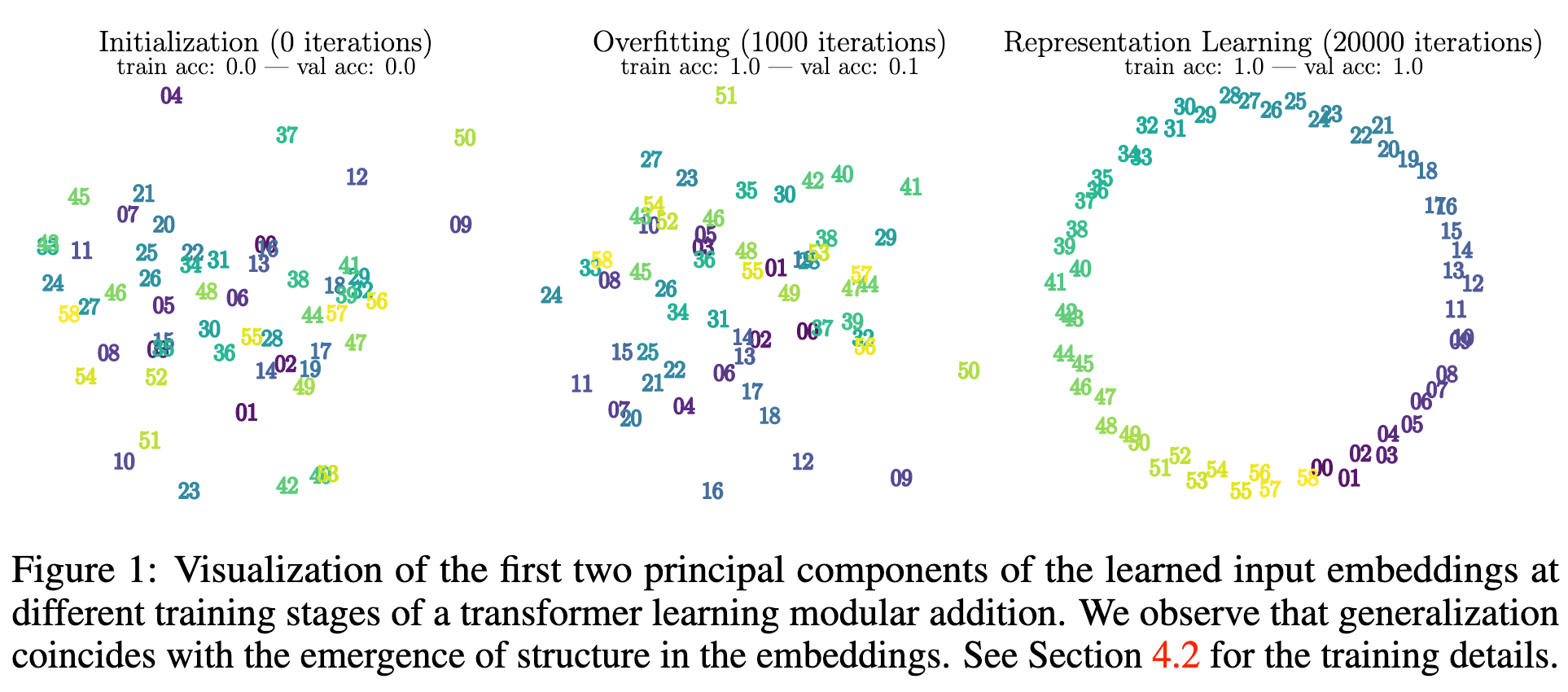
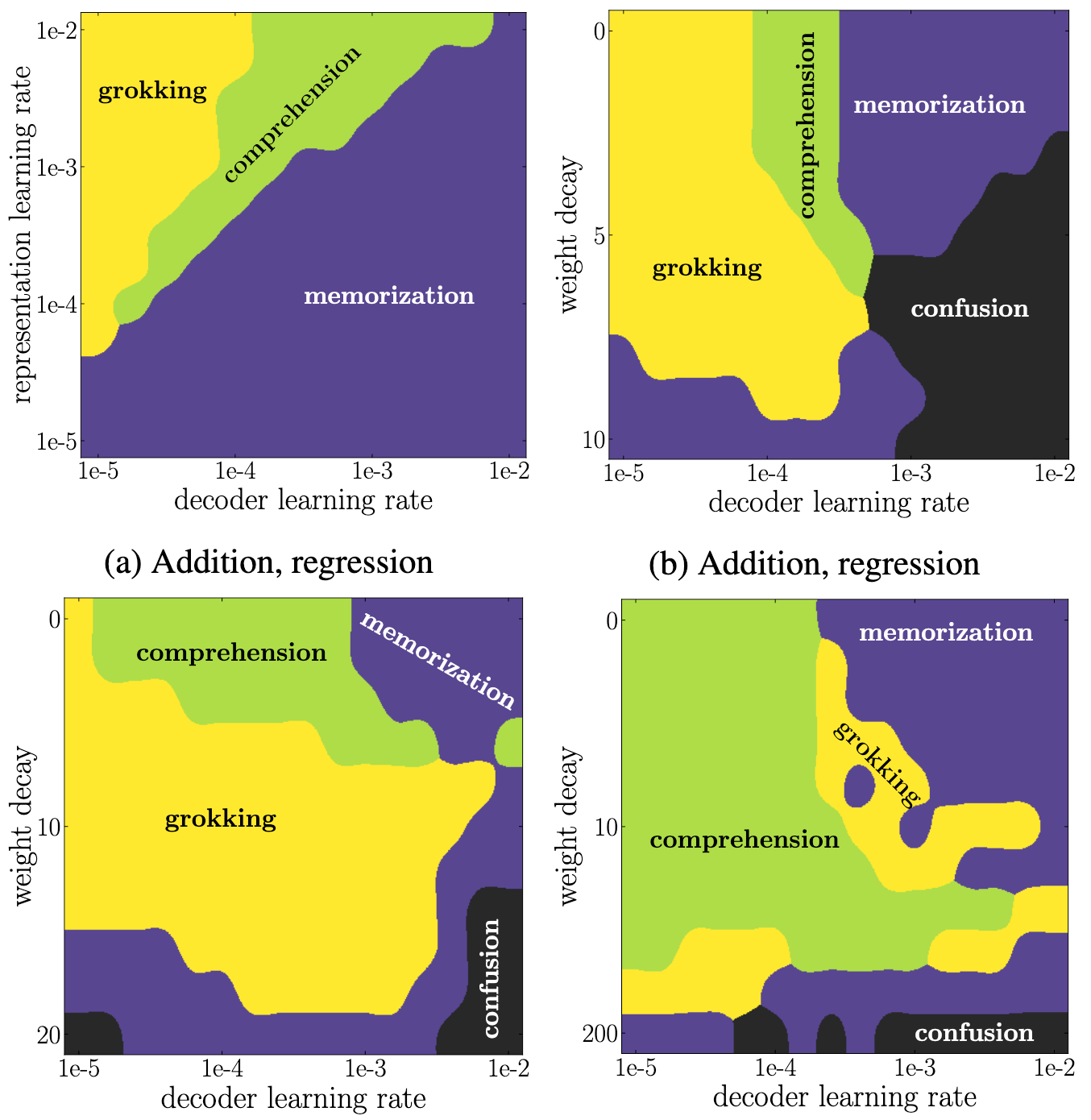
- Training involves multiple phase: grokking is one of them MIT paper
- generalization, grokking, memorization and confusion
- When representations becomes structured, then generalization occurs:
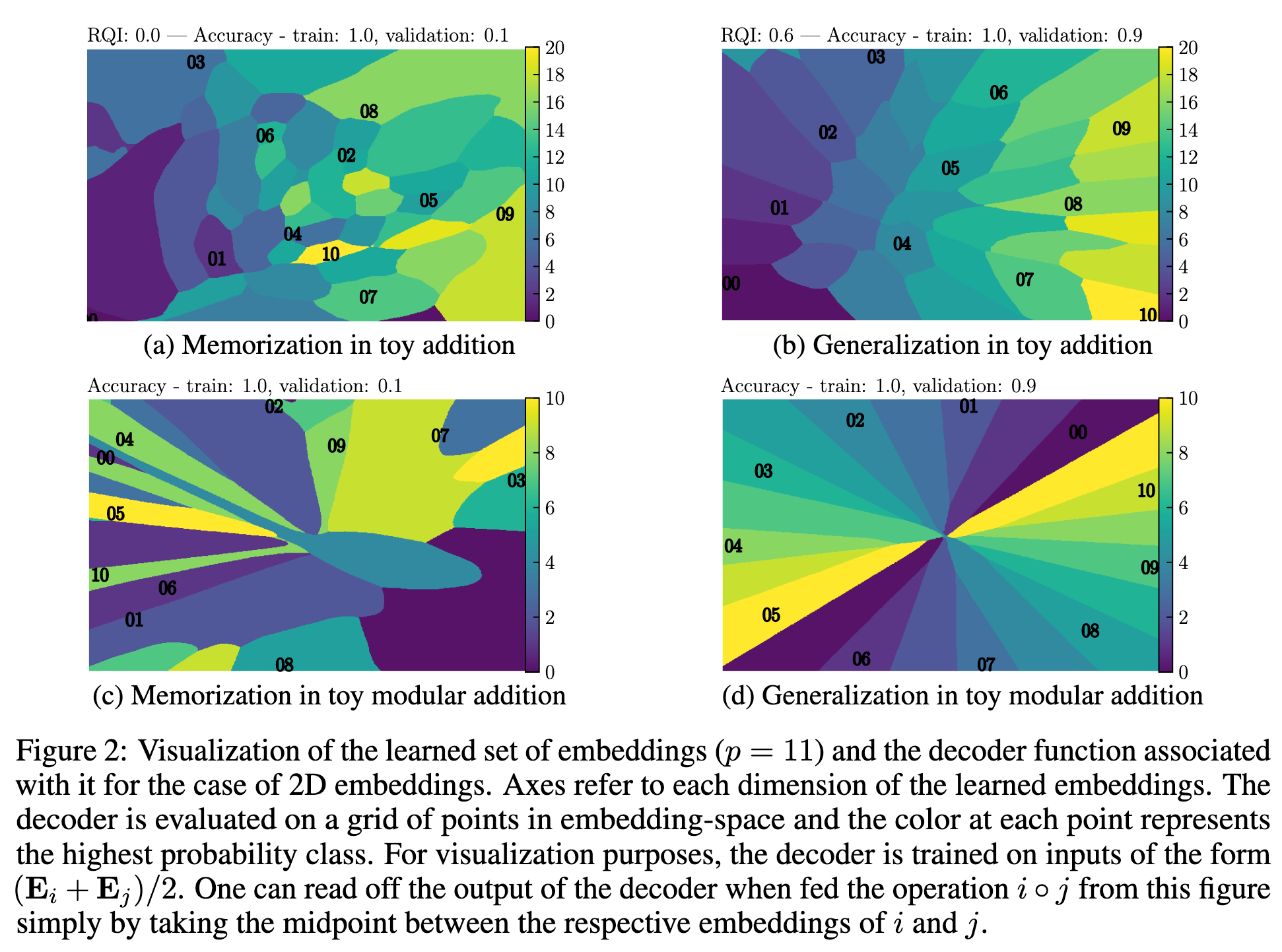
- The 4 phases depend on hyper-parameters:
- Why do we observe phase during training?
- NYU paper 2023
- Because of competing sub-networks: dense for memorization and another sparse for generalization
- You have seen:
- template code for pytorch
- deep learning as differentiable programming
- XPs for underfitting, interpolation point, over-parameterized
- importance of regularization
- double descent: why and when; grokking
Mini-project
- To be done in groups of 2 (or 1 student)
- Must give me by email a github link (or zip file with full GIT history, including .git/ dir) that contains:
- A report in markdown or pure text format, with links to figures/curves
- A code in python + pytorch
- deadline = 15 Decembre 2023
- Work to be done:
- Choose a public dataset that you can train a deep learning model on
- Create 1+ model(s) in pytorch that is based on/a combination of MLP, LSTM, ConvNet, Transformer
- It’s OK to get inspiration from some code on the web, but you shall not just reuse one, and you must state in your report where you got inspiration from
- Train it, evaluate, analyze and if possible iterate this process a few times
- Criteria used for grades:
- Quality and depth of your analysis
- Balanced contribution in the group (through GIT history)
- Work progress over time (through GIT history)
- The report is by far the most important!
- between 5 and 15 “pages”
Practice “RNN overfit”
- Download Meteo data
- Goal = predict the next T° given a seq of T°
- train on 2019, test on 2020
- Objectives:
- template code for RNN & time series
- use of Dataset & DataLoader
- explore underfitting/overfitting
- understand sources of variability
- Data: convert to tensor, then to Dataset, then to DataLoader:
# trainx = 1, seqlen, 1
# trainy = 1, seqlen, 1
trainds = torch.utils.data.TensorDataset(trainx, trainy)
trainloader = torch.utils.data.DataLoader(trainds, batch_size=1, shuffle=False)
testds = torch.utils.data.TensorDataset(testx, testy)
testloader = torch.utils.data.DataLoader(testds, batch_size=1, shuffle=False)
crit = nn.MSELoss()- Model: simple RNN with a linear regression layer:
class Mod(nn.Module):
def __init__(self,nhid):
super(Mod, self).__init__()
self.rnn = nn.RNN(1,nhid)
self.mlp = nn.Linear(nhid,1)
def forward(self,x):
# x = B, T, d
...- Every day, the RNN predicts the next day T°:
- \(X\) is a tensor (Batch, Time, Dim) = (1, 365, 1)
- \(\hat y_t = f(x_t)\)
- loss: \(||\hat y_t - x_{t+1}||^2\)
- all 365 predictions shall be processed in a single pass !
- Look at both outputs of RNN in pytorch.org/docs
- compute MSE on test:
def test(mod):
mod.train(False)
totloss, nbatch = 0., 0
for data in testloader:
inputs, goldy = data
haty = mod(inputs)
loss = crit(haty,goldy)
totloss += loss.item()
nbatch += 1
totloss /= float(nbatch)
mod.train(True)
return totloss- Training loop:
def train(mod):
optim = torch.optim.Adam(mod.parameters(), lr=0.001)
for epoch in range(nepochs):
testloss = test(mod)
totloss, nbatch = 0., 0
for data in trainloader:
inputs, goldy = data
optim.zero_grad()
haty = mod(inputs)
loss = crit(haty,goldy)
totloss += loss.item()
nbatch += 1
loss.backward()
optim.step()
totloss /= float(nbatch)
print("err",totloss,testloss)
print("fin",totloss,testloss,file=sys.stderr)- The Main:
mod=Mod(h)
print("nparms",sum(p.numel() for p in mod.parameters() if p.requires_grad),file=sys.stderr)
train(mod)- Step 1: copy/paste + complete this code and run a training
- check convergence!
- Step 2: compare and analyze \(h=1\), \(h=100\)
- Step 3: rerun multiple times: what’s the variability and why?
Practice “Knots”
- Underfitting regime:
- Take the “knots” code with \(K=0\) in the course and modify it to add 1 parameter \(K=1\)
- Plot the loss curve and try to obtain a similar one as in the course
- Overfitting regime:
- modify the code with \(K=4\)
- generate a test set composed of 20 uniform samples and plot both the train and test loss
- try to get curves that clearly overfit
Practice tensors
Exercice from B. Favre
Avec l’aide de la documentation pytorch, calculez l’expression suivante: \[a = 1_{(3 \times 2)}\] \[b = \sin(1+\sqrt{3I_2} + 5 ||a||)\]
Exercice: combine CNN and RNN
- you have a “long” time series with 3000 timesteps. You want to handle it by using first a CNN with kernel=3 and stride=3 that will reduce it to 1000 timesteps, and then an LSTM.
- The goal is to classify the full sequence into N classes (e.g., whether the sequence of temperature has been recorded in winter or summer…)
- write both methods of the model: init() and forward()